fuRo、新型レスキューロボット「Hibiscus」を披露(2/2 ページ)
ロボットを操作するヒューマンインタフェースも大きな改良点だ。今回は6つのモーターをそれぞれ制御する必要はあるが、ゲーム機用のコントローラ1つで操作が可能。さらに、今後は東京消防庁のハイパーレスキュー(消防救助機動部隊)と共同研究を進め、1本のジョイスティックで操作できる半自律走行制御システムを開発する予定だという。
「ロボットを片手で操縦できるようになれば、もう一方の手でサーモグラフィなどの探索システムを操作できる。たとえば、タッチパネル付きのディスプレイを用意して、指1本でタッチすると撮影開始、指2本で画面ズームなど、より効率的に探査活動を行えるだろう」。
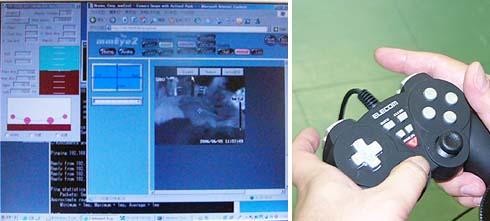 エレコムのゲームコントローラで操作する。PCの画面中央はサーモグラフィ映像。映っているのは、床に寝転がった某ライター氏なのだが、素人目には人に見えない
エレコムのゲームコントローラで操作する。PCの画面中央はサーモグラフィ映像。映っているのは、床に寝転がった某ライター氏なのだが、素人目には人に見えない大きく進化したレスキューロボットだが、実際の運用にあたってはまだ課題が残されている。小柳氏によると、最大の検討課題は通信インフラだ。デモンストレーションではIEEE 802.11g無線LANを使用しているが、無線LANの伝送距離は見通し20メートル程度にすぎず、瓦礫(障害物)が山積した被災地では実用的ではない。このため、実運用時にはロボットの“命綱”を兼ねてプラスチック光ファイバーによる有線通信を行うという。
また将来的には、複数のロボットがチームを組んで被災地に入り、無線のリピーターを兼ねた“子機”を置きながら前進する方法が有力だ。「無線のターミナルを40〜50メートル置きに置き、そのエリアの通信を確保する。そうすれば、いくつロボットを投入しても通信に問題ない」。
fuRoでは、半自律型ヒューマンインタフェースの研究と並行して、さらに本体を薄型にした9号機の開発を進めている。また、大手の住宅メーカーと協力し、住宅の床下に入って水漏れやクラックなどを検査するロボットも開発中だ。こちらも単なる応用ロボットではなく、いざという時にはレスキューロボットとして活用することを目指している。
「大きな地震が発生しても、震源地から20キロ離れれば被害の度合いは格段に軽くなる。そこに、いつでも動けるレスキューロボットがあれば、救出作業は迅速に行えるはず。実用を目指す以上、レスキューロボットは日常的にも使えるものでなければならない」(小柳氏)。
 未来ロボット技術研究センター(fuRo)の小柳栄次副所長
未来ロボット技術研究センター(fuRo)の小柳栄次副所長 クローラー部分の分解モデルも展示
クローラー部分の分解モデルも展示Hibiscusは、6月6日からパシフィコ横浜で開催される「ヨコハマ セーフティフェア'06」で一般公開デモンストレーションを行う予定だ。実施時間は、11時30分から11時50分、15時30分から15時50分までの2回。入場は無料。
関連記事
 悪路もOK――変形移動ロボット「チャリべえ」公開デ
悪路もOK――変形移動ロボット「チャリべえ」公開デ
世界初の搭乗可能なハイブリッド型不整地移動ロボット「チャリべえ」の公開デモンストレーションが5月16日に行われた。4本の脚と2つの車輪を持ち、人を乗せて荒れた路面や凸凹道でも移動できるロボットだ。 3000万円のロボットが子供の手でバラバラに――ROBOT解体LIVE
3000万円のロボットが子供の手でバラバラに――ROBOT解体LIVE
未来ロボット技術研究センター(fuRo)が「ROBOT解体LIVE2004」を開催。fuRo所長の古田貴之氏が、子供たちと一緒にヒューマノイドロボット「morph3」実機を分解しながら、最先端の技術を盛り込んだ2足歩行ロボットの内部構造を紹介した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PR


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。