災害時にも活躍する「住宅床下点検ロボット」登場(2/2 ページ)
» 2006年10月26日 19時15分 公開
[芹澤隆徳,ITmedia]
前方にはパン/ティルト可能なカメラを搭載し、撮影した映像は無線LANを介してオペレーターのPCに送信する。後方には周囲の状況を確認できる魚眼レンズ付きのカメラを装備。オペレーターは、複数のカメラ画像やジャイロセンサーによる傾斜角情報を見ながら、タッチパネルやゲーム用コントローラで操縦できる。

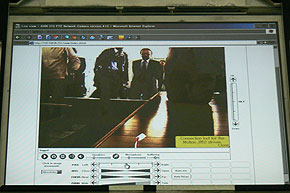 PCの画面(左)。赤と青のインジケータは傾斜角を示す。右はタッチパネル式のコントロール用ディスプレイ
PCの画面(左)。赤と青のインジケータは傾斜角を示す。右はタッチパネル式のコントロール用ディスプレイまたデモンストレーションでは、ソニー製ハイビジョンカメラを搭載したIrisも登場し、床下のリアルな映像をテレビに映し出した。ただし、ハイビジョンカメラを使用する場合は無線LANの帯域が足りないため、現時点では有線接続(HDMIケーブル)が必須。また、Irisに搭載された高輝度LEDだけでは光量が足りない、民生用カメラではパン/ティルト機能がないといった課題もあるという。


今年度中に機能評価用のロボットを製作し、来年度には量産化に向けた安全設計の検討、および試験運用を開始する。そして2年後の2008年度には、200台前後の「住宅床下点検ロボット」を製造し、大和ハウス工業が持つ全国93カ所の支社に配備する計画だ。
千葉工業大学未来ロボット技術研究センターの小柳栄次副所長は、「床下点検ロボットは、カメラをサーモグラフィに載せ替えるだけでレスキュー用途に転用できる。それが全国に配備されていれば、災害発生時に“すぐに動けるロボット”と“熟練のオペレーター”が各地に存在することになり、大変心強い」と話す。なお、今回の産学協同研究に至った理由については「大和ハウス工業の社会貢献を含めたロボット開発に共感して共同開発を決めた」とした。
関連記事
 レスキューロボット「Hibiscus」を操縦してきました
レスキューロボット「Hibiscus」を操縦してきました
千葉工業大学の未来ロボット技術研究センター(fuRo)の新しいレスキューロボット「Hibiscus」の発表会に行ってきた。速報は掲載済みなので、こちらではもうすこし詳しい話を動画とともに紹介しよう。それに、ちょっと操縦もさせてもらったのだ。 fuRo、新型レスキューロボット「Hibiscus」を披露
fuRo、新型レスキューロボット「Hibiscus」を披露
千葉工業大学未来ロボット技術研究センター(fuRo)の小柳栄次副所長と吉田研究員の開発チームは6月5日、瓦礫の上を安定して走行できる新型レスキューロボット「Hibiscus」を公開した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PR


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。