| News | 2002年12月13日 01:48 PM 更新 |
っぽいかもしれない
出渕裕デザインのインパクト〜ヒューマノイドロボット「Promet」登場(2/4)
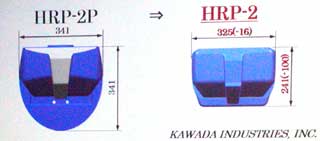
まず、内部配線を大幅に基板化(プロトタイプはやっぱり空中配線が多かったのだ)、専用バッテリーパックの使用により、例えば胴回りはこのくらい細くなっている(プレゼンテーション画像より)。
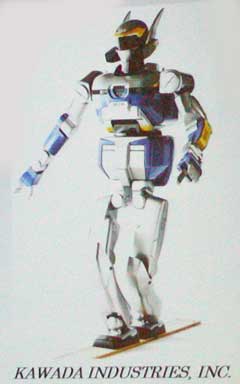
また、頭部には3つのカメラが三角形の頂点をなす形に取りつけられているのだけど、プロトタイプではそれが全部頭の中に入っていた。最終成果機では、上だけを頭の中に入れて、下2つは肩の上のユニットにしてしまった。こうすることで、小顔化を実現したというわけ。

なお、いかにも出渕メカだって思わせる「耳」(アンテナ)は、純粋にデザインである。「転んだときなんかに壊れやすくなるから、嫌がられるかなと思ったのですが、かっこよければいいじゃないっていうんで、そのまま通っちゃった」だって。
愛称もついた。「Promet」(プロメテと発音されてた)。これは出渕さんが最初に書いたスケッチに書いた名前がそのまま採用されたもの。今のところ特に意味はないそうだ。プロメテウスっぽいイメージはあったそうなんだけど、基本的にはその場のノリでつけた名前。でも、これからなんかの頭文字つなぎは考えるかもしれないそうだ。

Prometの身体検査
身長は154センチ、体重58キロ。これは胸部に格納された専用バッテリーパック(NiMH)込み。関節の全自由度は30。本体内に、Pentium III/1.26GHzのPC-AT互換機が2台が入っていて、それぞれが運動と視覚を担当する。
脚が片持ち構造(一方からしか支持されていない)なので、足を前後に並べる姿勢が取れるというのも特長。狭いところを通れるようにするのが目的なのだけど、ハードウェア的には「平均台歩き」ができるってことでもある(*4)。
ロボットの姿勢制御に使われるアクチュエータは使っていると熱くなる。だから、あんまり長時間の連続動作はできない。従来は1時間が限界だったのが、放熱システムをつけることで、2時間までOKになった。
バッテリーの持ちは(作業内容に大きく作用されるけど)およそ1時間。だから、バッテリーパックを1度取り替えて、それが空になったら、放熱のために一休みってことになる計算かな(*5)。
*4 ハードウェア的にできても、実際にそれができるためにはソフトウェアが必要になる。わたしは、逆上がりができるまでにとっても時間がかかったから、そのことをよく知っている。
*5 もっとも、実際の作業では、長時間動作しっぱなしということは、あまりないかもしれない。意外に待機時間ってあるものだ。
[こばやしゆたか, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。