| News | 2003年11月21日 07:00 PM 更新 |
早大とテムザックが開発した“人を載せて2足歩行するロボット”(2/2)
「人を載せるのって難しいんです」(ロボ)
WL-16の歩行制御には、早稲田大学が1987年に基本理論を発表した2足歩行制御方式「ZMP(Zero Moment Point)安定判別規範に基づくモーメント補償軌道算出アルゴリズム」が用いられている。これは、ZMP(歩行中のロボットにかかる重力と慣性力のモーメントが0になる路面上の点)が安定歩行のための軌道を満たすようなロボット運動を計算で求めることで、安定した2足歩行を可能にするというものだ。
ソニーの「SDR(QRIO)」、ZMPの「PINO」、経済産業省プロジェクトの「HRP-1」など、現在では多くのヒューマノイドロボットが早大の2足歩行アルゴリズムを使っている。

国産ヒューマノイドロボットの2足歩行アルゴリズムは、早大が生みの親
人を載せて歩くというのは、実はロボットにとって非常に難しい。
歩行制御パターンを計算するためには、重心位置や慣性モーメントなど力学的パラメーターが必要になる。だが、生身の人間の力学的パラメーターを測定するのは非常に難しく、さらに搭乗した人間は荷物のようにじっとはしてくれないので、ロボットの上で少しでも動くとすぐにパラメーターは変動してしまうといた問題があった。
そこでWL-16では、足部に柔軟性も持たせることで力学モデル誤差を吸収する「仮想コンプライアンス制御」という制御法を採用。搭乗者(積載物)が多少動いたり路面の凹凸があっても安定した歩行を可能にした。
CPUにPentium III/850MHzを使った制御用コンピュータを腰部に装備し、バッテリーは三洋電機製のニッケル水素充電池を採用。現在は、フル充電で約1時間の走行が行えるという。
“下肢歩行モジュール”としての2足歩行ロボットの提案
WL-16に搭載された直動アクチュエーターは、12本すべて同じモノが使われているため量産時のコストダウン効果が高い。実験用に作られたWL-16は材料と加工費だけで約1000万円ほどかかっているが「量産効果で自動車ぐらいの価格にすることは十分可能」(高西教授)という。
今回の発表では人間を載せて2足歩行を行っていたが、WL-16は「さまざまなシステムに応用可能な実用的汎用モジュールとしての2足歩行ロボット」というのが開発コンセプトとなっている。
「自分のところの研究を生かしたロボットを作りたいという声は非常に多いが、“2足歩行”の開発は一朝一夕にはできない。われわれがWL-16のように、上体部に人間までも載せられる下肢部のみの2足歩行ロボットをモジュールとして提供することで、簡単にトータル機能を持った2足歩行ロボットができあがる。人間が載れば車椅子ならぬ“2足歩行イス”となり、荷物を載せれば階段も昇降できる“歩く台車”になる。人間型の上半身をつければヒューマノイドロボットも構成できる」(高西教授)
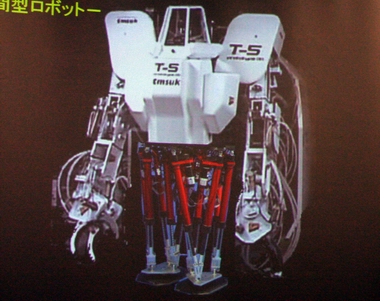
写真は、WL-16にテムザックの水圧駆動汎用遠隔操作ロボット「T-5」を上半身として合成したもの。なかなかカッコイイ
なかでも、期待されるのはやはり人間の乗り物としての2足歩行ロボットだ。
「車椅子も電動化され便利になっているが、階段の昇り降りだけはどうしてもできない。イタリアに階段の昇降ができるクローラー式の車椅子があるが、狭い日本家屋では利用が難しい。屋内の移動には2足歩行が便利。2足で歩く人間のために作られた環境を、人とシェアするという意味で、2足歩行のメリットは大きい」(高西教授)
関連記事
関連リンク
[西坂真人, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
前のページ | 2/2 | 最初のページ
![]()
ITmediaはアイティメディア株式会社の登録商標です。